Something Useful: Right Hand Rule
We often tend describe the direction of rotational motion by using the phrases clockwise and counterclockwise. While they may be able to work, it can get pretty confusing. Therefore, to make things more simple, we can describe the direction of the rotational motion with "into the page" and "out of the page". As can be seen in the gif below, when the object is turning "into the page" it is rotating downwards. When the object is turning "out of the page", it is rotating upwards. Using the right hand rule will help determine the direction of torque, which can be useful when trying to solve a problem.
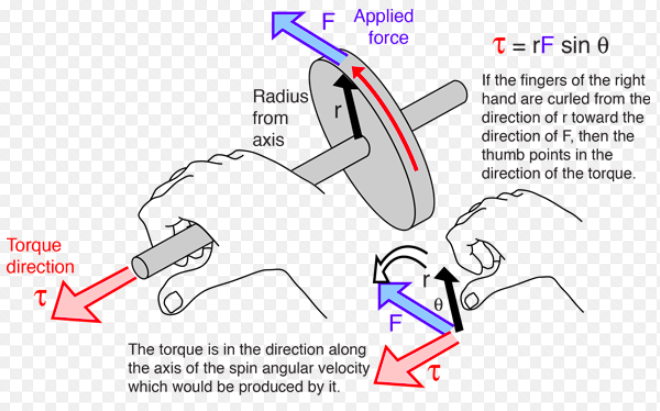
http://hyperphysics.phy-astr.gsu.edu/hbase/tord.html
|
https://gifer.com/en/8A4g
|
Center of Mass:
Prior to this unit, we treated everything as a single point at the center of mass. The Center of Mass can be defined as the point representing the mean position in a body or system. There are two types of objects when it comes describing their center of masses. There are point objects, in which we assume all mass is located at a single point, and then there are extended objects, in which we assume all mass is distributed throughout the object.
One way to find the center of mass is through the Hang Test. You hang an object from a point and draw a vertical line through that point. You then hang the object again and draw another vertical line. At the point where the lines intersect, that is where the center of mass is.
One way to find the center of mass is through the Hang Test. You hang an object from a point and draw a vertical line through that point. You then hang the object again and draw another vertical line. At the point where the lines intersect, that is where the center of mass is.
Another useful tool when solving problems is extended free body diagrams. They help you recognize the different forces acting on the object. You can draw them by creating a diagram of the object and labeling all the forces and their directions. Below is a video that provides examples on how free body diagrams can be used to solve problems involving torque.
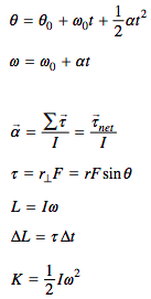
Rotational Kinematics:
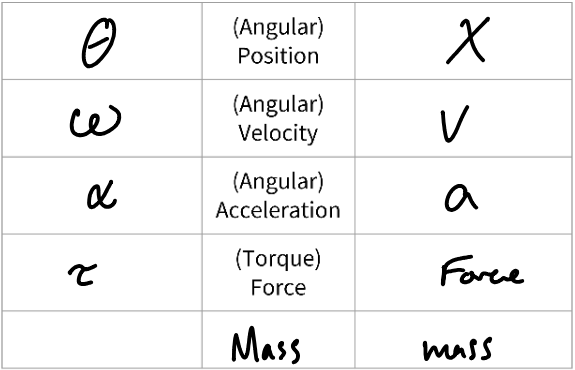
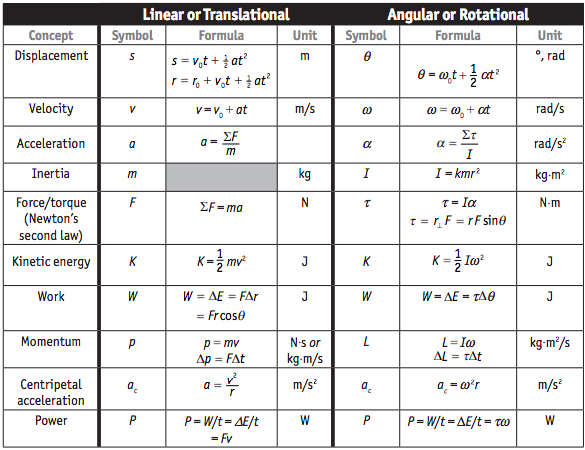
Translational kinematics and rotational kinematics use the same formulas, but they substitute different variables. Velocity become angular velocity, acceleration become angular acceleration and etc.
Bare in mind when converting units: 1 rotation = 1 revolution = 360 degrees = 2π
Bare in mind when converting units: 1 rotation = 1 revolution = 360 degrees = 2π
Rotational vs Linear Motion
|
|

|
Torque:
A torque is a push or a pull that attempts to change the rotation of an object. Further from the fulcrum, the point of rotation, increases the ability for rotation. Think of it this way, the torque is equal to the perpendicular force multiplied by the torque arm. In this equation, the torque arm is more important than the force. If there is no torque arm, there is no torque. Static equilibrium is when the net torque and net force is equal to zero.

Static Equilibrium
Rotational Inertia & Energy:
Rotational Inertia is the physical quantity relating the location of mass relative to the axis of rotation of the object. It is the resistance to change in angular velocity around the axis of rotation. With that being said, the closer the mass of the object to the axis of rotation, the easier it is to change its rotational motion and the smaller its rotational inertia. The magnitude relies on the total mass and the distribution of mass around the axis of rotation. Therefore, if a hoop and a disc that both have the same mass and the same radius, both go down the same ramp, the disc will go down it faster. This is due to its distribution of mass which resulted in more rotational inertia. The equation of rotational inertia is I=mr^2, which shows that the radius is more important than mass. If the mass is doubled, the rotational inertia doubles, but if the radius is doubled, the rotational inertia quadruples.
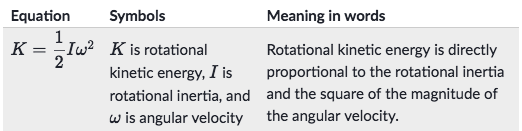
Rotational Kinetic Energy is Kinetic energy due to rotational motion and is a product of rotational inertia and angular velocity.
Angular Momentum & Impulse:
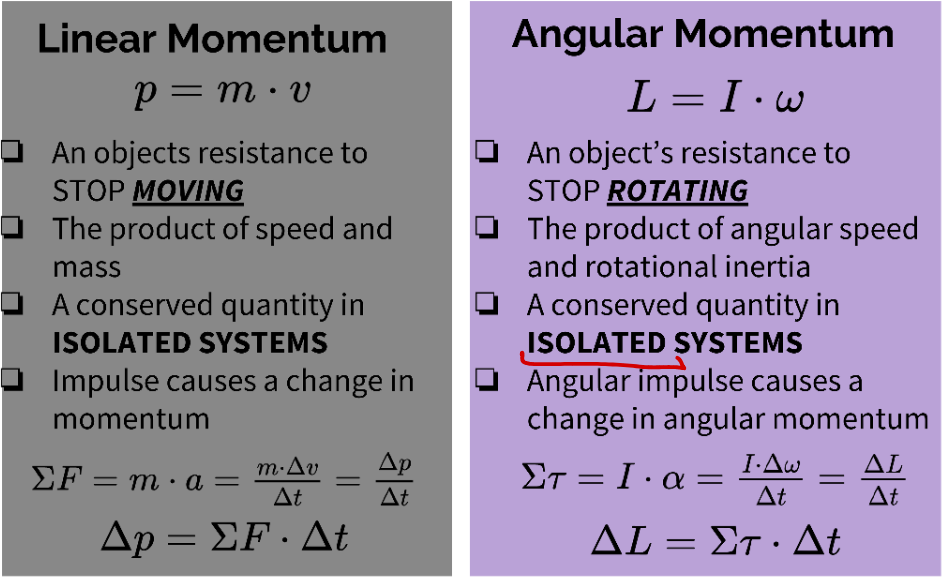
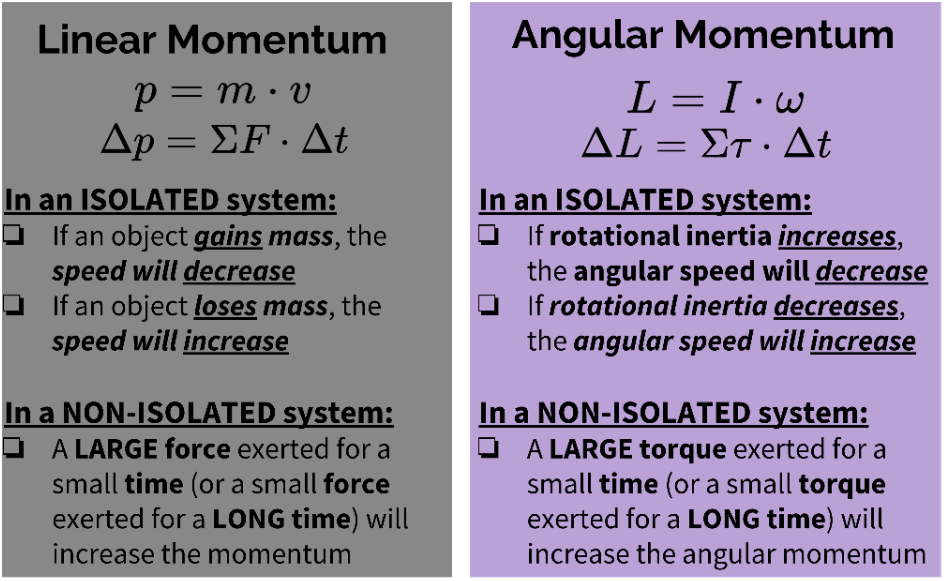
Angular momentum is an object's resistance to stop rotating. Angular momentum is a direct product of rotational inertia and angular velocity, hence giving the formula: L = I *ω. It is a conserved quantity, which means the total angular momentum of a system remains constant unless acted on by an external torque.
Linear vs Angular Momentum
|
|
Review (includes all previous units):
Widget is loading comments...
